ANYmal: The quadrupedal robot that has mastered parkour
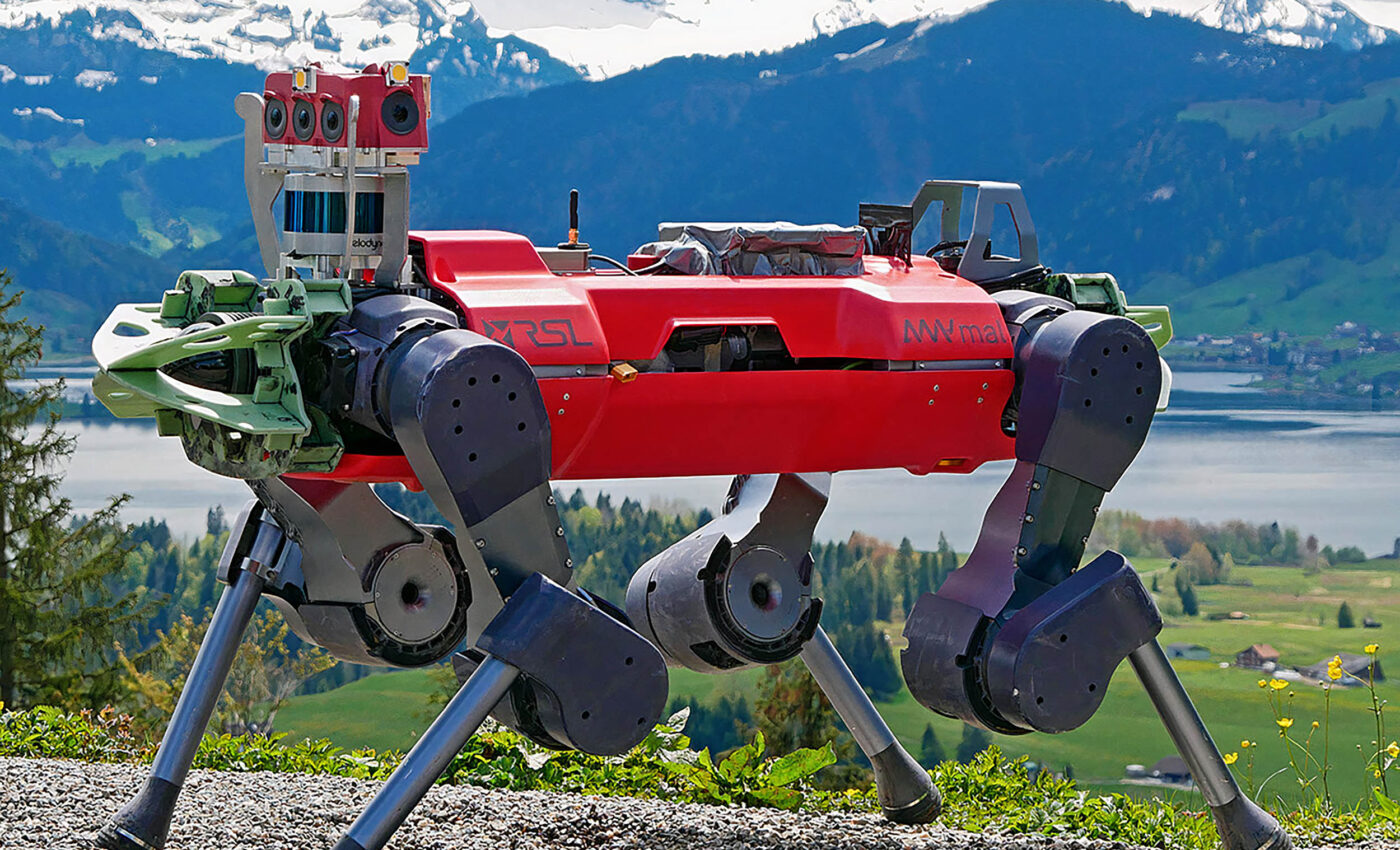
ANYmal, the quadrupedal robot familiar with the rugged terrains of Swiss hiking trails, has recently upgraded its skill set. Researchers at ETH Zurich have propelled this robotic marvel into the realm of parkour — a discipline that emphasizes smooth navigation over urban obstacles.
Moreover, ANYmal, from ANYbotics, has become adept at traversing challenging terrains typical of construction sites and disaster areas. This showcases its potential in environments fraught with danger or complexity.
Harnessing mechanical innovations

At the heart of ANYmal’s evolution are two pioneering teams under the guidance of Marco Hutter, a professor in the Department of Mechanical and Process Engineering at ETH Zurich.
One team, under doctoral student and parkour enthusiast Nikita Rudin, expanded the limits for legged robots. Rudin countered his peers’ skepticism about the developmental ceiling of such robots. He has proven that the mechanics of legged robots possess untapped potential.
ANYmal’s leap into parkour
Drawing from his parkour experience, Rudin employed machine learning techniques to teach ANYmal new, dynamic skills. This included scaling obstacles and executing complex maneuvers to descend them.
{kind=link}
ANYmal’s learning process resembled that of a human child, relying on trial and error. Consequently, it uses its camera and artificial intelligence to assess obstacles and determines the most probable movements to overcome them based on its training.
Rudin believes that while each new skill might be nearing technical perfection, there’s still a vast scope for improvement. Specifically, he sees significant potential in enabling ANYmal to autonomously navigate through unpredictable terrains, such as those strewn with rubble in disaster zones.
A synergy of techniques
The project’s second branch, led by Rudin’s colleague, Fabian Jenelten, aimed to prepare ANYmal for real-world applications such as disaster response and construction site management.
Jenelten’s approach was to blend traditional model-based control methods with machine learning. This combination enabled ANYmal to perform complex maneuvers accurately. These include identifying and crossing gaps, as well as navigating through debris. Machine learning, in turn, equipped the robot with flexible movement patterns for unforeseen challenges.
This integrated approach has significantly enhanced ANYmal’s capabilities. The robot now confidently navigates slippery or unstable surfaces. This opens the door for its deployment in hazardous environments where human safety is paramount.
Soon, ANYmal will be ready to undertake missions in disaster-stricken areas or construction sites, offering a glimpse into the future of robotic assistance in high-risk scenarios.
ANYmal’s path to robotic innovation
In summary, these remarkable technological advancements have shattered previous limitations of robotic mobility and set a new benchmark for the capabilities of quadrupedal robots like ANYmal. Through the integration of machine learning and model-based control, ANYmal now excels in navigating complex terrains, from mastering parkour maneuvers to ensuring stability on unpredictable surfaces.
This pioneering work promises to extend the robot’s application beyond mere exploration, positioning it as a vital asset in disaster relief operations and hazardous environment assessments, ultimately paving the way for a future where robots and humans collaborate to overcome challenges and ensure safety in the most perilous conditions.
Click here to see a video of ANYmal in action.
The full study was published in the journal Science Robotics.
—–
Like what you read? Subscribe to our newsletter for engaging articles, exclusive content, and the latest updates.
Check us out on EarthSnap, a free app brought to you by Eric Ralls and Earth.com.
—–












